


新闻分类
联系我们
- ●济南铂晶电子科技有限公司
- ●地址:济南市高新区舜华路359号三庆世纪财富中心A2座6层
- ●联系人: 技术咨询(季经理)18853112688
- ●联系人: 销售经理(魏经理)15666772121
- ●公司电话:0531-85700899
- ●公司传真:0531-85708558
- ●网址:www.bojingchina.com
- ●邮箱:bojingdianzi@163.com
- ●销售部邮箱:sales@bojingchina.com
- ●人资部邮箱:hr@bojingchina.com
- ●采购部邮箱:purchase@bojingchina.com
- ●技术部邮箱:jihongyu@bojingchina.com
新闻中心
电流互感器饱和对低压电动机保护的影响及对策
编辑:www.bojingchina.com
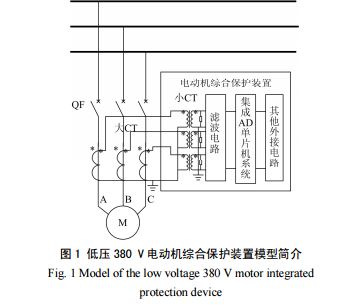
1 低压380 V电动机综合保护装置模型简介针对目前低压电动机定子绕组故障时可能发生的电流互感器的饱和问题,本文利用了 PSCAD 软件搭建了安装在低压 380 V 侧电动机综合保护装置的模型如图 1 所示,图中包括了低压 380 V 供电系统中串入一次侧保护用电流互感器以及其配套的电动机综合保护装置中的微型电流互感器(图中与低压电网直接串联的一次侧的保护用电流互感器将在下文中简称为大 CT,而集成于电动机综合保护装置内的微型电流互感器将在下文中简称为小 CT)。
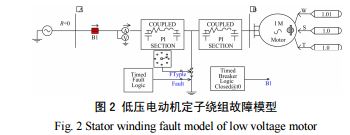
本文利用PSCAD软件搭建了针对低压380 V电动机运行时定子绕组故障的简单模型,如图 2 所示
由于常用的电磁暂态仿真程序 PSCAD 中,没有提供一个较为完善的保护用电流互感器模型,而其自带元件库中使用较为广泛的是基于 Langevin
函数的 JA 模型[8]。为模拟实际运行时电流互感器由于常用的电磁暂态仿真程序 PSCAD 中,没有提供一个较为完善的保护用电流互感器模型,而其自带元件库中使用较为广泛的是基于 Langevin函数的 JA 模型[8]。为模拟实际运行时电流互感器的电磁过程,本文利用基于 JA 模型的自定义模块来进行电流互感器特性的仿真,如图 3、图 4 所示。

确动作。(2)保护用电流互感器(大 CT)轻度饱和当电流互感器的变比选择过小,且在低压电动机定子绕组发生故障时,大 CT 很可能发生饱和。当大 CT 饱和程度不大时,大、小 CT 仿真波形如图 7、图 8 所示。
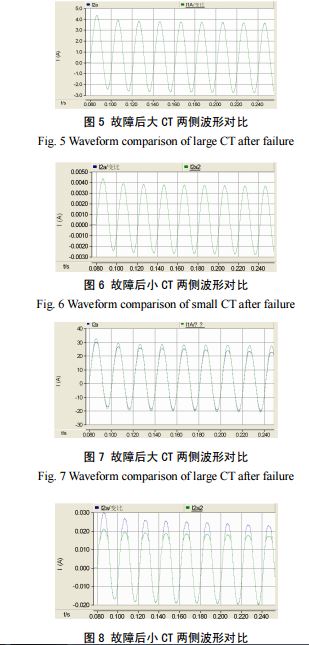
通过 PSCAD 中的“Single Phase RMS Meter”模 块测量后经计算得出,图 7 中由大 CT 的饱和造成 的电流误差为 13.185%。 同样,图 8 中由于小 CT 的饱和造成的电流误 差为 4.142%。通过对图 7、图 8 两电流互感器仿真 特性进行分析可以看出:大 CT 发生饱和程度不大 时,其二次侧的电流值超过了小 CT 的额定准确限 值一次电流,引起小 CT 发生饱和。经误差分析可 知:由大 CT 引起的误差比小 CT 要大。因此,低 压电动机综合保护装置能否正确动作主要取决于大CT 在线路故障时的特性。经分析可知在此种情况 下,有可能引起低压用电动机综合保护装置中基于 电流整定值动作的主保护不动作。 (3)保护用电流互感器(大 CT)深度饱和 当低压电动机定子绕组发生故障大 CT 的饱和 程度比较严重时,大、小 CT 的仿真波形如图 9、 图 10 所示。
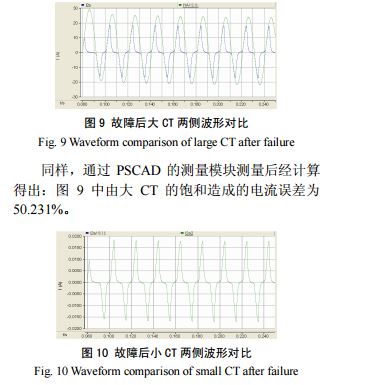
由图 10可以看出,大 CT发生严重饱和时,二次侧电流值很小,不足以引起小 CT 发生饱和,故小 CT 可以正确传变电流。经误差分析可知:此
时,互感器测量值比实际值要小很多。这样经互感器采集出的故障电流值就会明显小于此电动机保护装置内部设置的电流整定值,与(2)相比,此种情况对低压电动机保护产生的不利影响更为严重。通过三组 PSCAD 软件的仿真结果对比可知:低压电动机定子绕组发生故障时,与集成于电动机综合保护装置中的微型电流互感器(小 CT)相比,低压线路直接串联的保护用电流互感器(大 CT)的性能对电动机综合保护装置能否正确动作起着主要的作用。
3 利用三采样算法来提高低压电动机综合
保护装置动作的可靠性针对第 2 节中分析的低压电动机定子绕组发生故障时,两电流互感器不能正确传变故障电流而引起的电动机综合保护装置可能误动作的问题。考虑
到产品硬件改良工艺的实现比较困难,故本文从微
机继保装置软件的角度提出了通过改善电动机综合保护
装置的继保算法来提高保护装置动作准确性的措施。
从 2.2 节的仿真波形可以看出:故障后两电流
互感器采集的波形虽然畸变,但在每周波开始的一
段时间内,互感器二次侧的电流几乎是可以正确跟
随一次侧电流的变化而变化的,只不过这段时间比
较短暂。因此,对要求快速动作的主保护而言,在
电流互感器发生饱和时,如果继续采用傅里叶算
法,由于二次侧不能正确反映故障电流,就会使保
护误动。所以,本文提出了在电动机综合保护装置
的继保算法程序中加入三采样算法的措施。因为这
种算法最少只需要三个采样点的时间便可完成参数
的计算[9],采样时间缩短,能够一定程度上减小电
流互感器的饱和对保护装置中主保护的影响。
同时由 2.2 节分析可知:低压 380 V 电动机所
配置的综合保护装置能否正确动作的主要影响因素
是与低压线路直接相连的保护用电流互感器(大
CT)的性能。而为有效地说明大 CT 饱和时,电动
机综合保护装置中的主保护采用三采样算法要优于
傅里叶算法的结论。并依据直观说明问题、简化论证
过程的思想。本文通过 Matlab 软件编程仿真不同算法
下,经 PSCAD 仿真的大 CT 饱和后存在的误差。
在不考虑非周期分量的情况下,低压电动机定
子绕组故障的电流波形如图 11 所示。利用目前微
机继保通常所采用的 24 点采样[11],经傅里叶算法
计算结果如图 12 所示,三采样算法计算结果如图
13 示。
由图12可以看出:傅里叶算法需要20 ms才能
完成参数的计算。经 Matlab 中的“Workplace”窗
口[12]中得到仿真结果(如表 1 示),误差比较大。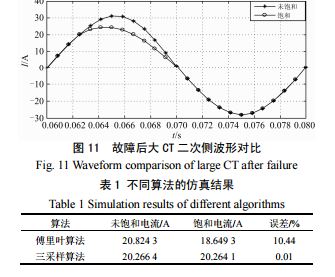
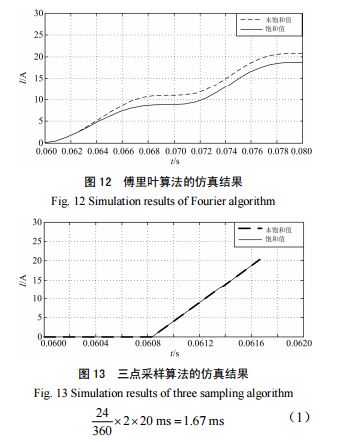
而三采样算法只需要 1.67 ms 便可完成参数的 计算。经 Matlab 中的“Workplace”窗口中得到仿 真结果(如表 1 所示),电流误差为:0.01%,几乎 可以看作 0。通过图 13 中的波形也可以看出,大 CT 二次侧在饱和时几乎能够正确反映一次侧的电 流。 为了有效地说明问题,将经三采样算法采样出 的饱和时电流的有效值与经傅里叶算法采样出的未 饱和时波形结果进行比较,误差为

此误差要比利用傅里叶采样时饱和引起的误差 要低很多,说明三采样算法在发生故障时,与傅里 叶算法相比能够一定程度上减小电流互感器饱和对 继电保护装置的影响。虽然三采样算法不具滤波功 能[10],但根据本文所分析的情况:三采样算法所需 的时间要比傅里叶算法所需的时间少很多,暂不需 考虑谐波的影响,所以加入三采样算法对提高低压 电动机综合保护装置中主保护的速动性有很好的效 果。 此措施存在两方面的优点:一方面,只要改进 电动机综合保护装置内部的继保算法即可,操作简单;另一方面,因为只需采样几点,有效地提高了 电动机综合保护装置内基于电流整定值动作的主保 护的速动性。 4 结论 本文利用 PSCAD 软件在电动机定子绕组发生 故障时,对 380 V 低压线路上装设的用于串接电动 机保护装置的保护用电流互感器(大 CT)和电动 机综合保护装置内的微型电流互感器(小 CT)的 性能进行仿真分析。并针对仿真结果,提出了在电 动机综合保护装置的继保算法中加入三采样算法的 措施。此措施经 Matlab 软件仿真证明可以有效地克 服在电流互感器饱和的情况下,因傅里叶算法采样时 间过长而造成电动机综合保护装置的主保护不能可靠 动作的弊端,提高了保护装置运行的安全可靠性。
参考文献 [1] 王红. 新型低压电动机综合保护装置原理与实现[J]. 低压电器, 2006(3): 43-47. WANG Hong. Principle and implementation of a new micro-processor protection device for low voltage motors[J]. Low Voltage Apparatus, 2006(3): 43-47. [2] 唐颖, 李玉林. 基于 ARM 技术的新型低压电动机保护 控制器设计[J]. 电力系统保护与控制, 2011, 38(15): 119-122. TANG Ying, LI Yu-lin. Design of new low-voltage motor protection controller based on ARM technology[J]. Power System Protection and Control, 2011, 38(15): 119-122. [3] 韩守亮, 崔淑梅. 一种新型模块化级联电机系统[J]. 电工技术学报, 2013, 28(2): 155-162. HAN Shou-liang, CUI Shu-mei. A new modular cascade machine system[J]. Transactions of China Electrotechnical Society, 2013, 28(2): 155-162. [4] 王德林, 郭成. 电力系统连续体和离散模型中机电扰 动传播的一致性研究[J]. 电工技术学报, 2012, 27(6): 161-167. WANG De-lin, GUO Cheng. Study on consistency of electromechanical disturbance propagation in continuum and discrete-models for power systems[J]. Transactions of China Electrotechnical Society, 2012, 27(6): 161-167. [5] 童悦, 李红斌, 张明明, 等. 一种全数字化高压电流互 感器在线校验系统[J]. 电工技术学报, 2010, 25(8): 59-64. TONG Yue, LI Hong-bin, ZHANG Ming-ming, et al. An all-digital on-line calibration system for high voltage current transformer[J]. Transactions of China Electrotechnical Society, 2010, 25(8): 59-64. [6] DL/T 866-2004 电流互感器和电压互感器选择及计算 导则[S]. DL/T 866-2004 the guide for selection and calculation of current transformers and voltage transformers[S]. [7] 李嘉, 王雪, 姚晴林. WDH-825A 微机同步电动机保护 装置[J]. 电力系统保护与控制, 2009, 37(13): 75-79. LI Jia, WANG Xue, YAO Qing-lin. WDH-825A microprocessor based motor protection[J]. Power System Protection and Control, 2009, 37(13): 75-79. [8] 黄莉, 杨卫星, 张雪松. 基于 PSCAD/EMTDC 的带气 隙电流互感器建模及仿真[J]. 电力系统保护与控制, 2010, 38(18): 178-182. HUANG Li, YANG Wei-xing, ZHANG Xue-song. Modeling and simulation of current transformer with air-gap based on PSCAD/EMTDC[J]. Power System Protection and Control, 2010, 38(18): 178-182. [9] 李斌, 范瑞卿, 贺家李. 电动机磁平衡式差动保护的 整定计算[J]. 电力系统保护与控制, 2010, 38(13): 79-82. LI Bin, FAN Rui-qing, HE Jia-li. Setting calculation of magnetic balanced differential protection of motor[J]. Power System Protection and Control, 2010, 38(13): 79-82. [10] 于群, 曹娜. 电力系统微机继电保护[M]. 北京: 机械 工业出版社, 2010. YU Qun, CAO Na. Micro-processor based protective relay in power system[M]. Beijing: China Machine Press, 2010. [11] 孙丽玲, 许伯强, 李志远. 基于MUSIC 与 SAA的笼型 异步电动机转子断条故障检测[J]. 电工技术学报, 2012, 27(12): 205-212. SUN Ling-li, XU Bo-qiang, LI Zhi-yuan. A MUSICSAA-based detection method for broken rotor bar fault in induction motors[J]. Transactions of China Electrotechnical Society, 2012, 27(12): 205-212. [12] 于群, 曹娜.MATLAB/Simulink 电力系统建模与仿真 [M]. 北京: 机械工业出版社, 2012. YU Qun, CAO Na. MATLAB/Simulink modeling and simulation of the power system[M]. Beijing: China Machine Press, 2012. 收稿日期:2013-12-21; 修回日期:2014-02-24
作者简介: 于梦瑶(1989-),女,硕士研究生,主要从事电力系统 继电保护的研究。